Voyage details and related metadata, reports, events and data.
IN2016_E02
- is a Marine National Facility ![]() voyage
voyage
Title: MNF Equipment Sea Trials
Voyage details on MNF site: https://mnf.csiro.au/en/Voyages/IN2016_E02
Period: 2016-12-15 03:30 to 2016-12-19 20:16 UTC
Duration: 4.70 days
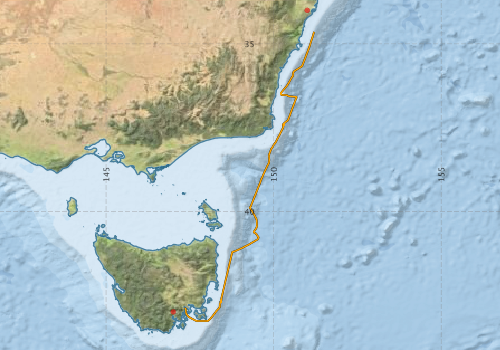
From: Sydney To: Hobart
Region: New South Wales coast south; Bass Strait; Tasmania coast east
Ship: Investigator (RV) [details]
Description: RV Investigator research voyage in2016_e02, titled "MNF Equipment Sea Trials." The Primary objective of IN2016_E02 is to complete the sea trial regime as follows: * Demonstrate trawling equipment functions correctly, provide ASP crew training / exposure to trawling and confirm suitable manning levels for future trawling voyages, including emptying of scientific samples from a laden net; * Collect trawling data for analysis; * Deep towed camera system testing; * Demonstrate functionality of other equipment modified / upgraded / installed / maintained during the Sydney dry dock period; * Complete the installation of the UHDAS (ADCP) computer, and use the transit and trawling time for calibration, testing, and assessment and training on the new UHDAS software installation; * Transport the Investigator from Sydney to Hobart; * Deep water calibration of DECAF (Kloser charter).
Leader: Don McKenzie
Projects:
Voyage extents: 43° 16.4' S to 34° 38.4' S 147° 20.3' E to 151° 12.4' E
Marlin Metadata:-
Metadata from OBIS Australia datasets:- biological data is published via the OBIS-AU IPT server and delivered to one or more of OBIS, ALA and GBIF
Download from OBIS Australia IPT View at - Ocean Biodiversity Information System (OBIS) Atlas of Living Australia (ALA) GBIF
Cruise Summary Report at SeaDataNet:-
Participants - on ship:-
| Name | Role | Organisation | Project |
|---|---|---|---|
| Don McKenzie | Voyage Manager | Marine National Facility | Voyage Management on RV Investigator |
| John Pogonoski | PI/Fish Specialist | CSIRO National Collections and Marine Infrastructure | Investigator - general vessel operations, gear trials, etc. |
| Max McGuire | Deputy Voyage Manager | Marine National Facility | Voyage Management on RV Investigator |
| Rudy Kloser | 12hr Charter | CSIRO Oceans & Atmosphere - Hobart | Deep Water Calibration Facility Experiments (DECAF) |
This list includes those that may have only been on part of the voyage. See voyage reports on 'Reports and Maps' tab for details.
Marine National Facility Reports - plans, summaries and data processing
-
IN2016_E02 Voyage Summary
- includes preliminary results, voyage narrative, types of data collected with C77/ROSCOP codes.
-
IN2016_E02 Scientific Highlights
- report of the key outputs
- View Survey map
Publications, reports and datasets from this voyage.
Dataset
- McKenzie, Don; Frances Cooke; Boyd, Matt; Navidad, Cisco; Taylor, Charlie; Plunkett, Tom (2022): IN2016_E02 Sydney to Hobart Bathymetry 10m - 210m Multi-resolution AusSeabed products. v1. CSIRO. Data Collection 10.25919/4twp-ed02
IPT Resource
- Australian National Fish Collection (ANFC) (Darwin Core Archive) External link to reference
Journal Article
- Haris, Kunnath,Kloser, Rudy J,Ryan, Tim E,Malan, Jacques,Demer, David (2017) Deep-water calibration of echosounders used for biomass surveys and species identification. ICES Journal of Marine Science 75 pp1117-1130. 10.1093/icesjms/fsx206
- Lucieer, Vanessa,Flukes, Emma,Monk, Jacquomo,Walsh, Peter (2024) Geomorphometric maps of Australia’s Marine Park estate and their role in improving the integrated monitoring and management of marine ecosystems. Frontiers in Marine Science 10 pp-. 10.3389/fmars.2023.1302108
Search for publications, reports and datasets from this and other voyages
Data publishing
This is a list of online datasets hosted by CSIRO. Other processed datasets hosted by collaborating organisations may be found on the 'Metadata' or "Reports, Publications and Maps' tab.
Use the Get data link on the right to extract data using the NCMI Data Trawler.
| Data Stream | Data Summary | Get data | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Marine biodiversity observations and/or samples |
|
Get Data from Trawler |
||||||||||||
| Multibeam echosounder |
|
Get Data from Trawler |
||||||||||||
| Radon measurements |
|
Get Data from Trawler Download RV Investigator Radon dataset (XLSX) |
||||||||||||
| Sub-bottom profiler |
|
Get Data from Trawler |
||||||||||||
| Singlebeam echosounder |
|
Get Data from Trawler |
| ID | When (UTC) | Lat | Long | Instrument | Identifier | Action | Log | Subject / Comment |
|---|
Deployments by start time:- Click on column header to sort. Use link on 'Deployment' to see full details. Use the CSV button at the bottom to export data (tab delimited).
Search for deployments from this voyage and others
| Deployment | Operation | Station | Cast | Gear | Project | Start and end times | Start Location | End Location | Depth range | Max Depth | Description | |||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Catch [details] | 3 | CSIRO 4m Beam Trawl | 2457 | 2016-12-16 00:00 | -36.4855 | 150.2153 | ||||||||
| Catch [details] | 6 | CSIRO 4m Beam Trawl | 2457 | 2016-12-17 00:00 | -37.4017 | 150.2910 | ||||||||
| Catch [details] | 14 | CSIRO 4m Beam Trawl | 2457 | 2016-12-19 00:00 | -42.6793 | 148.4233 | ||||||||