Archival tag tracks
Tracks estimated from archival tags deployed on juvenile SBT were used in determining their habitat preferences in the Great Australian Bight (see Estimating habitat preferences). A number of methods exist for estimating location from archival tag data; the method used in this study was developed at CSIRO using the "twilight likelihood" (TL) method described in Basson et al. (2016). It can be summarized as follows:
- The light data from each twilight event is used to estimate the likelihood of having observed that light data given any location on the globe.
- The estimated likelihood surfaces get input to a grid-based Hidden Markov Model (HMM), where the location of a fish (on a 1° x 1° grid) at each twilight is the hidden state to be estimated and the probability of moving between states (i.e. grid cells) is assumed to be a random walk.
- Observational data which may be informative in determining location can be included in the HMM in the form of a likelihood. The HMMs used here included surface temperature and depth data recorded on the tags compared against global SST and bathymetry data.
- The output of the HMM is the posterior probability of a fish being in each possible grid cell on the globe (excluding any cells that correspond to land masses) during each twilight event.
- A "most probable track" is estimated by taking a weighted average of all the grid latitudes and longitudes using the posterior probabilities at each twilight as the weights.
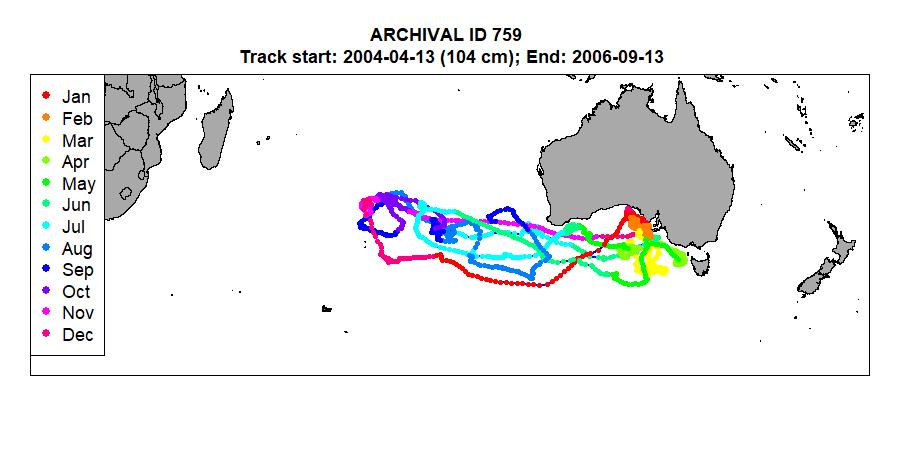
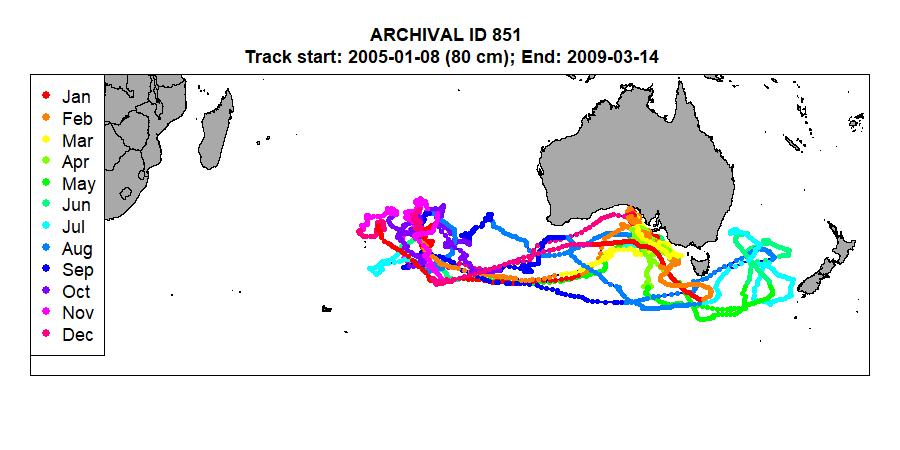
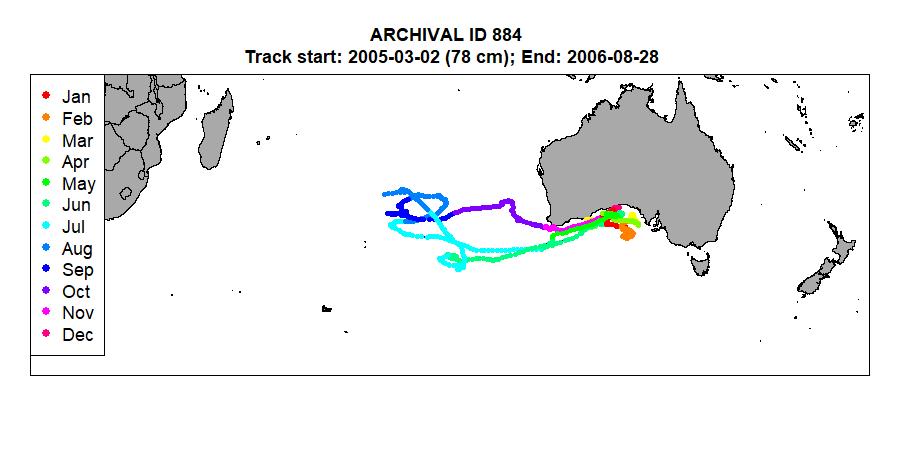
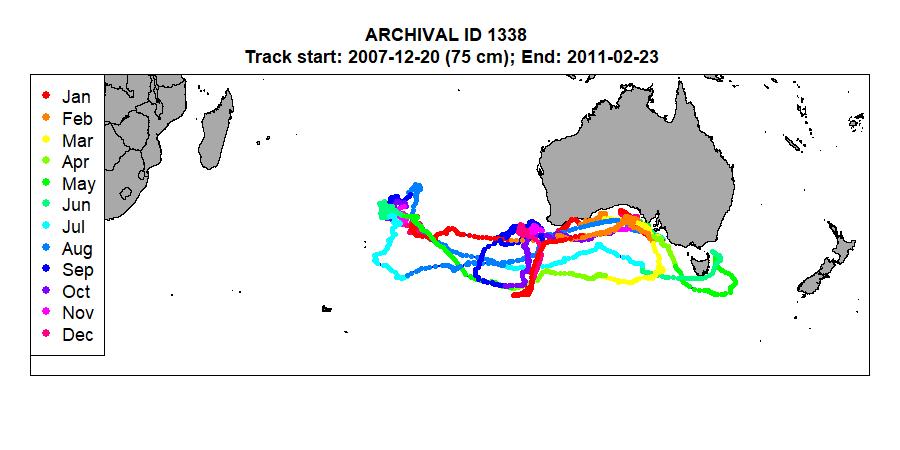
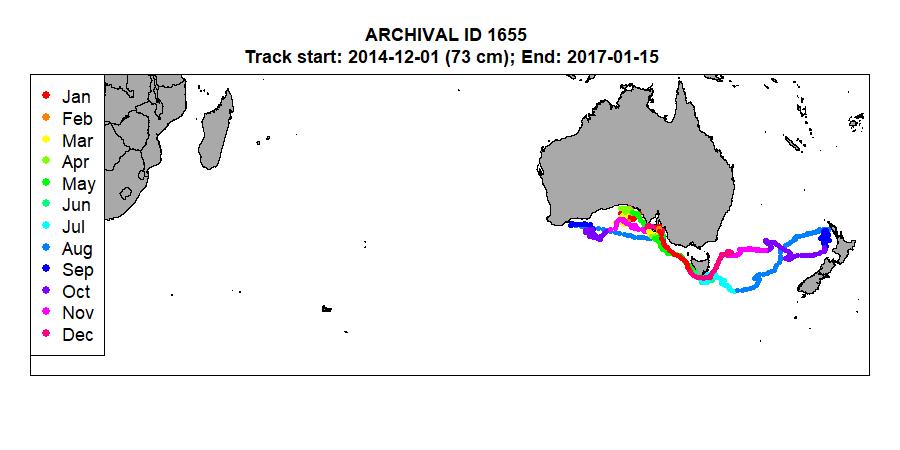
Example tracks
- Release date and end date of the track, and length of fish at release are given in the title.
- Click on any map to open a full-size image in another window.