|
South East Marine
Protected Areas (MPAs) Seamounts project
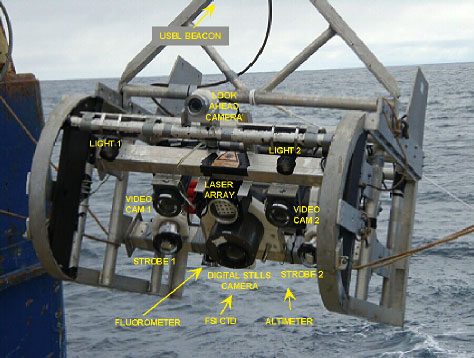
Survey Equipment : Deep Video System
CSIRO designed and built a stereo video system on a towed body
system used for habitat mapping and biodiversity survey work.
 |
 |
| Making adjustments to the
cable system |
The Deep Video system secured
on the back deck of the Southery Surveyor |
Stereo video capture and interpretation:
Shortis, M. R., Seager, J. W., Williams, A., Barker, B. A. and
Sherlock, M. - A towed body stereo-video system for deep water
benthic habitat surveys. Eighth Conference on Optical 3-D
Measurement Techniques, A. Grun and H. Kahmen (Eds), ETH Zurich,
Switzerland, ISBN 3-906467-67-8, Volume II, pp 150-157 (2007)
(pdf)
Stereo imagery and measurements:
System configuration
Platform Pressure |
Druck PTX1400, range 0-250 Bar
absolute |
Platform Pitch/Roll |
Crossbow Dual Axis CXTA02 Tilt
sensor |
Platform Fluorometer |
Seatech Serial No 100S |
Platform Compass |
Honeywell HMR3100 |
Platform Altimeter |
Datasonic/Benthos, PSA900 |
Platform CTD |
Falmouth Scientific 2” MicroCTD
Serial #1468M |
Platform Serial Interface |
Quatech 4 port Serial Device
Server |
Platform Position |
Sonardyne Super Sub Mini 7970
using channel H6 Sonardyne USBL Ver5.15C Transceiver
# 1151 |
GPS |
Vessel differential corrected
Ashtech GGA,VTG |
Wireout |
Winch mounted rotation sensor
(6 magnets) and software layer map |
Digital Stills System |
Canon 20D 8.3 Megapixel Body
Number 0330116680 Lens Canon EFS10-22 F3.5-4.5 USM set to
approx 12mm
Strobes – dual Canon 580EX – ETTL
mode
Flash sync – Canon STE2 transmitter
|
Stereo Cameras |
2 x 1/3” 3CCD Hitachi HV-D30P
with Fujinon TF2.8DA-8 |
Look Ahead Camera |
1 x Watec 1/3” WAT231S
with Avenir TTSG0234 lens |
Laser |
2 x Laserex 10 mW (red) |
Laser array |
16-laser array unit for stereo
video calibration (described in Shortis et al 2007 cited
above) |
Lights |
2 x Deep Sea Power and Light – Deep
Multi Sealites 250W each |
Angle of Cameras/strobes |
oblique angle: 50º, when
the system is sitting on flat ground; for angle of field
of view need also take pitch and roll of the camera system
into account |
Angle of look Ahead Camera |
oblique angle: 8º, when
the system is sitting on flat ground |
VCR for Camera 1 - Port |
Sony DSR-30P |
VCR for Camera 2 - Strbd |
Sony DSR-40P |
Video Transmission |
IFS VT/VR7420 4 channel
digital video multiplexer |
Data Transmission |
Prizm TEL 10/100 Ethernet TX/FX
Converter P/N 300910 Serial 098 |
Auxiliary Components |
CSIRO Video Overlayer
CSIRO Audio Encoder
CSIRO LANC to RS232 converter
Quatech 8 port Serial Device
Server
TP-Link 8 port Fast Ethernet
Switch
Dell Optiplex SX280
|
Output log file (Dvid file)
Data file headers:
PC Time, Pressure, Leak Detect, Roll, Pitch, AC Phase1, AC Phase2,
Fluoro, Can Temp, Compass, Status, GPS Time, Dec Lat, Dec Long,
Lat, Long, GPS Status, COG, SOG, Altimeter, Wireout, CTD Cond,
CTD Temp, CTD Press, VCR Timecode, Photo Index, Sdyne Select, Flag,
Time, raw_x, raw_y, raw_d, pitch, roll, bearing qual, slant
range.

|
|
