Argo Technical CoP
a place for collaboration and knowledge sharing
About us
Our Community of Practice
The Argo Technical Community of Practice was established by a small group of Technicians in 2021 as a forum for collaboration, knowledge sharing and coordinated action to establish, review and refine best practice procedures for pre-deployment testing of floats to eliminate premature deaths and performance-debilitating failures for core and BGC Argo.
We aim to create an environment where individuals working directly with Argo floats can discuss technical problems e.g. checkout testing, common issues, hardware design ideas, and deployment logistics. One of the primary goals is to identify issues that occur across programs which will then be presented to manufacturers with 'one voice'.
We aim to build an inclusive environment where we can share resources and coach smaller groups.
Participant Engagement
We meet quarterly over Zoom and rotate the chair and responsibility for each meeting.
We have 20 to 30 people dial in to our meetings from the USA, Japan, India and Australia
The group is not open to vendors, and is targeted at technical staff working directly with floats.
We welcome topics for investigation from PI's and we will capture and report our key findings to AST
Founding Members
Pat McMahon (CSIRO, Founding Chair)
Deb West-Mack (WHOI)
Ryan Anderson (WHOI)
Rick Rupan (UW)
Elizabeth Steffan (PMEL)
Chanelle Cadot (PMEL)

Get in touch
Contact: Pat McMahon pat.mcmahon@csiro.au
Next Meeting Topics for discussion: Solo and Deep Solo Date. 25th April 2023. Agency Chair: Combined Meeting Meeting Chair: Rick Rupan rupan@uw.edu
Zoom Registration: Contact Rick Rupan to Register for this meeting Previous Meetings Third Argo Tech CoP Meeting: Argo Deployment methods and MBARI Coastal float development 1. UW Update on APEX bladder oiling to prevent stiction 2. PMEL Deep Solo and Core Navis Deployemnt Methods 3. WHOI: Core Solo and Navis BGC Deployment Methods 4. SIO: Deep/Core/BGC Solo Deployment Methods 5. UW: EM Apex Deployemnt Methods 6. CSIRO: Remote Control Argo Release 7. MBARI Coastal Float Presentation Number of Attendees. 21. Agency Chair: CSIRO Meeting Chair: Pat McMahon
Second Argo Tech CoP Meeting: Seabird Navis and Seabird BGC Argo floats 1. Introduction to the Community of Practice 2. Updates for Community and previous meeting Recap . 3. WHOI BGC Navis flow through sensor checks 4. PMEL Argo Core Navis flow through sensor checks 5. UW Apex system flow through sensor checks 6. Introduction to UW float members and Lab operation. 7. UW Overnight bladder checks and pneumatic testing/leak detection . 8. Apex Pneumatic Bladder issue overview. 8. Apex Pneumatic Bladder issues - Why is it happening and possible fixes. Number of Attendees. 27. Agency Chair: UW Meeting Chair: Rick Rupan
First Argo Tech CoP Meeting: Seabird Navis and Seabird BGC Argo floats 1. Overview of the Community of Practice 2. Discussion of the structure of the CoP and how we want it to operate. 3. CoP Slack for communication between meetings 4. Sharing of proprietary information 5. WHOI: Navis float 6. Common issues among users 7. Tests that users are performing beyond Seabird's recommendations. 8. Potential design changes, and recommendations that should be esclated to Seabird. Number of Attendees. 21. Agency Chair: WHOI Meeting Chair: Ryan Anderson
Argo Tech CoP website developed by Pat McMahon 2021
Event Calandar and Meeting Information
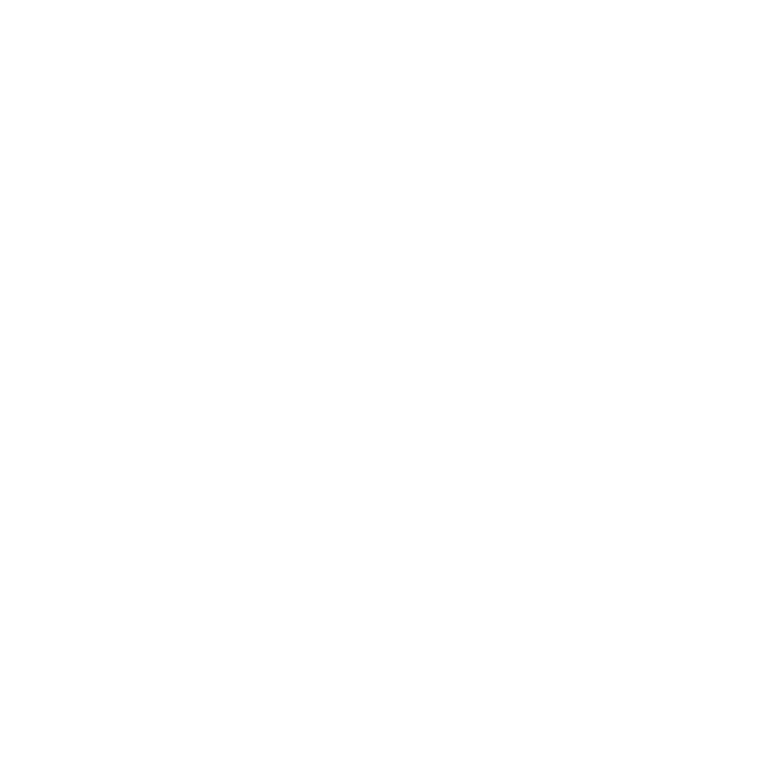
Project - Remote Control Argo Release
Pat McMahon, CSIRO
What is the problem we set out to solve?


Proof of concept model
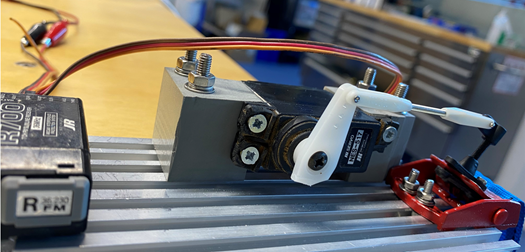
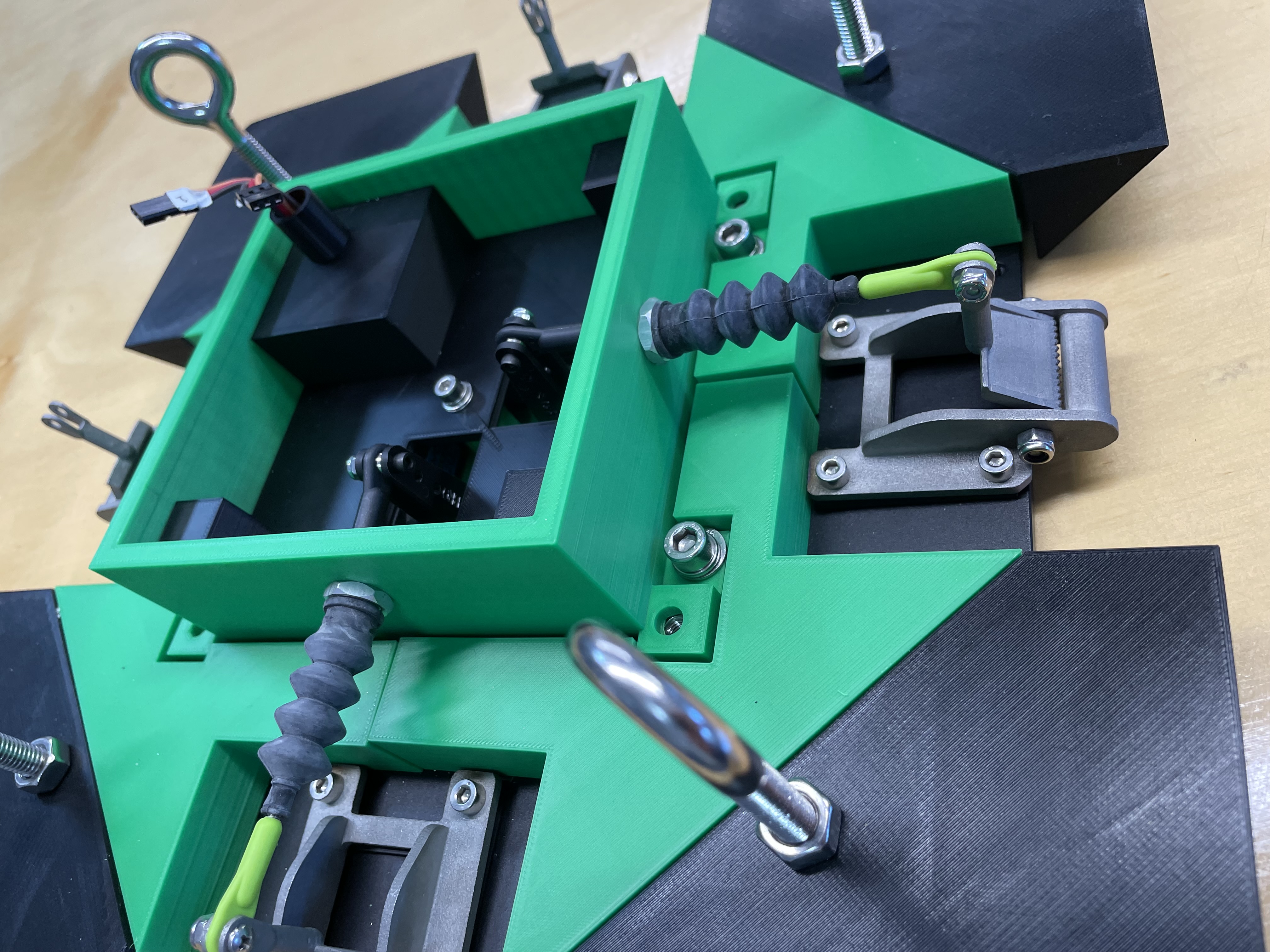
Full size model and considerations
Initial deployments and adoption of technology
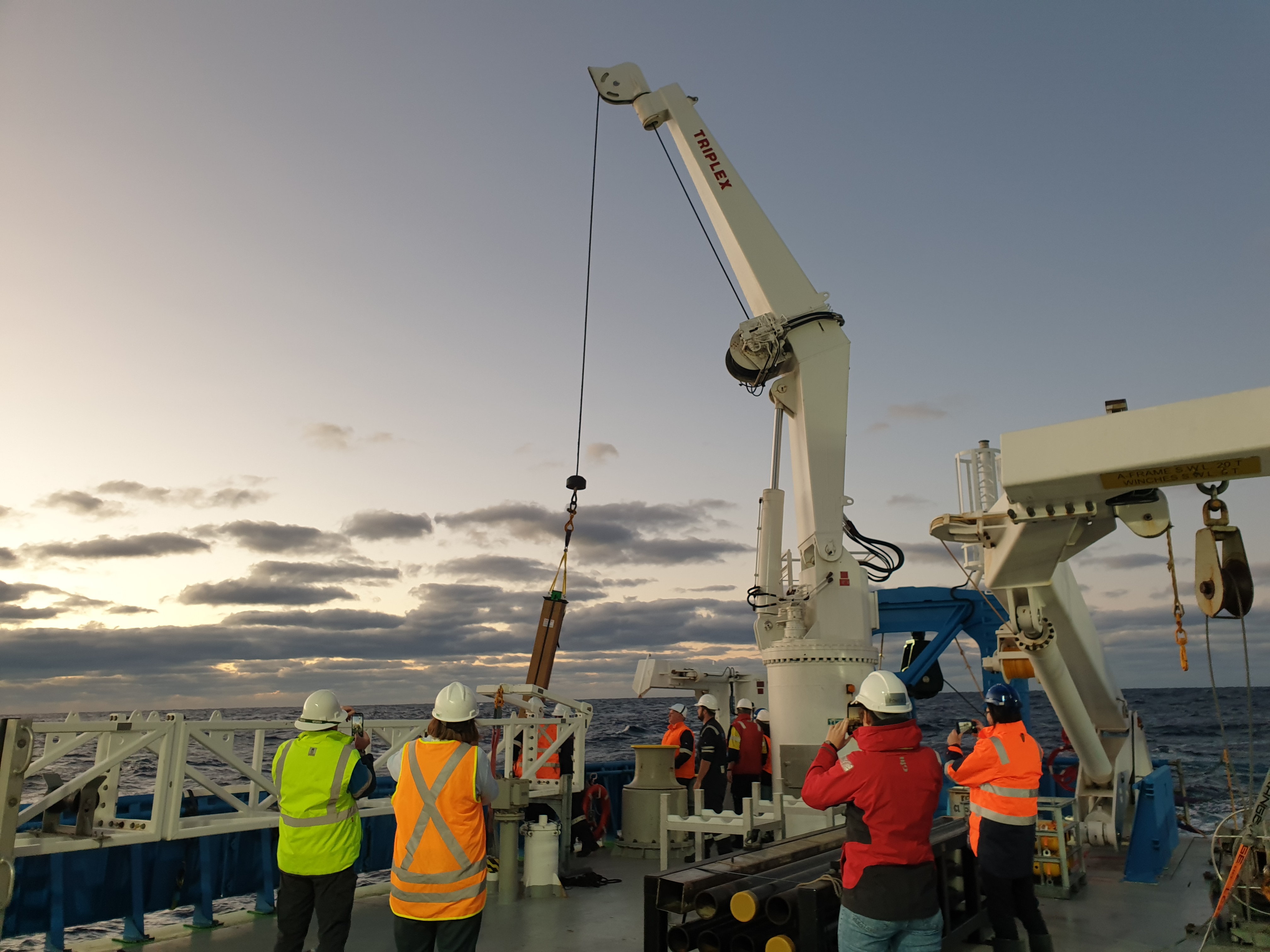
Deployment video and feedback from RV Investigator